AirForce - Módulo de motorización con esencia
El proyecto AirForce es un conjunto de motorización que incluye la placa base AirPort con funcionalidad de regulación integrada y la subplaca de motorización de doble canal AirCraft. Puede expandir la capacidad de motorización para hasta 16 motores según sus necesidades. Debido a su diseño compacto y ligero, un rendimiento sólido y una alta capacidad de expansión, se le dio el nombre de Proyecto AirForce.
Características:
- Compacto y de fácil acceso para la conexión de interfaces.
- Interfaces no están completamente encapsuladas como cajas negras, lo que mejora la capacidad de conexión.
- No utiliza demasiados pines de temporizador de la unidad central de microcontroladores (STM32).
Repositorio del proyecto: linyuxuanlin/AirForceDVR
AirPort - Placa base con funcionalidad de regulación integrada
🚧
AirCraft - Subplaca de motorización de doble canal
La subplaca de motorización de doble canal AirCraft se basa en el diseño de un chip de motorización integrado TB6612FNG, con un método de control lógico adicional. Solo requiere 4 pines (2 canales normales y 2 canales PWM) para controlar dos motores (dirección/velocidad). En comparación con las soluciones convencionales en el mercado, se reducen dos canales de E/S, lo que ahorra valiosos recursos de pines en el controlador principal. En cuanto a las especificaciones del chip de motorización, la corriente máxima continua de un solo canal puede alcanzar 1.2A, con un pico de 2A/3.2A (pulsos continuos/pulsos únicos), lo que es más que suficiente para controlar los motores típicos de robots.
Parámetros del producto:
- Voltaje de entrada de la parte lógica VCC: 3.3~5V (predeterminado 5V)
- Voltaje de entrada de la parte de motorización VM: 2.5~12V (predeterminado 12V)
- Canales de motorización: 2 canales
- Corriente máxima continua de un solo canal: 1.2A
- Corriente de arranque máxima: 2A/3.2A (pulsos continuos/pulsos únicos)
- Interfaz: Pasadores espaciados a 2.54mm, conector XH2.54
- Tamaño del módulo: 23.7 × 15.8 mm
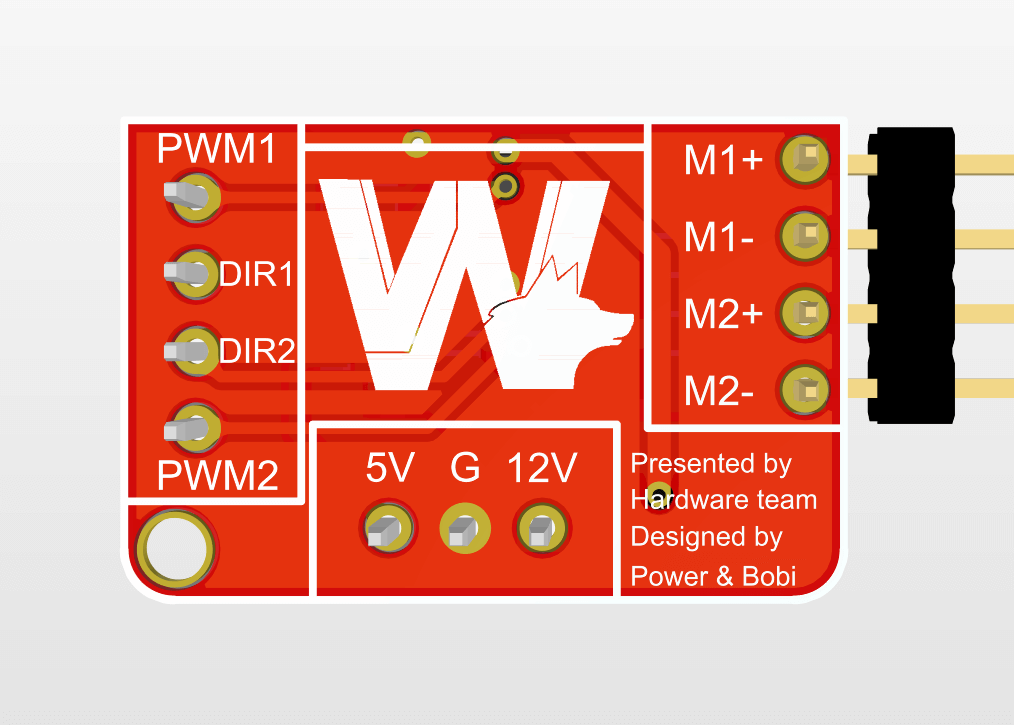
Descripción de los pines:
| Grupo de interfaces | Nombre | Descripción de la función |
|---|---|---|
| Interfaces de control | PWM1 | Pin de control de velocidad del motor M1 |
| Interfaces de control | DIR1 | Pin de control de dirección del motor M1 |
| Interfaces de control | DIR2 | Pin de control de dirección del motor M2 |
| Interfaces de control | PWM2 | Pin de control de velocidad del motor M2 |
| Interfaces de alimentación | 5V | Alimentación de la parte lógica |
| Interfaces de alimentación | G | Tierra (GND) |
| Interfaces de alimentación | 12V | Alimentación de los motores |
| Interfaces del motor | M1+ | Salida 1 del motor M1 |
| Interfaces del motor | M1- | Salida 2 del motor M1 |
| Interfaces del motor | M2+ | Salida 1 del motor M2 |
| Interfaces del motor | M1- | Salida 2 del motor M2 |
Tutorial de control:
- Interfaces de control
- DIR1/DIR2: Entradas de señal de control de avance y retroceso
- Ejemplo: Si DIR1 se establece en 1 (nivel alto), el motor M1 gira en sentido horario; si DIR1 se establece en 0 (nivel bajo), el motor M1 gira en sentido antihorario.
- PWM1/PWM2: Habilitación de control de los dos motores respectivos (se pueden utilizar para control de velocidad mediante PWM).
- DIR1/DIR2: Entradas de señal de control de avance y retroceso
- Interfaces de alimentación: Conectar a cualquier interfaz de alimentación en la placa base AirPort (o conectar 12V y 5V externos).
- Interfaces del motor: Conectar a las entradas del motor.
Imagen de dimensiones:
🚧
Referencias y agradecimientos
Certainly, here is the text translated into Spanish:
> Dirección original del artículo: <https://wiki-power.com/>
> Este artículo está protegido por la licencia [CC BY-NC-SA 4.0](https://creativecommons.org/licenses/by/4.0/deed.zh). Si desea reproducirlo, por favor indique la fuente.
Por supuesto, aquí está el texto traducido al español:
> Dirección original del artículo: <https://wiki-power.com/>
> Este artículo está protegido por la licencia [CC BY-NC-SA 4.0](https://creativecommons.org/licenses/by/4.0/deed.zh). Si desea reproducirlo, por favor indique la fuente.
Este post está traducido usando ChatGPT, por favor feedback si hay alguna omisión.